一条自动化产线看起来最显眼的是机器人、输送线、视觉检测和控制柜,但真正让很多小动作准时发生的,往往是气路里的电磁阀。气缸推出、夹爪闭合、挡停器升起、真空吸盘破真空,这些动作不复杂,却对节拍和稳定性很敏感。Festo电磁阀在这类场景中常被用作气动执行端的控制节点,负责把PLC或现场总线发出的电信号,转换成压缩空气的通断、换向和保持。
从气路角色看,电磁阀不是单独完成动作的部件。它前面通常有气源处理单元,后面接气缸、气爪、真空发生器或其他气动元件,中间还要考虑管路长度、接头方向、消音、节流和传感器反馈。现场调试时经常能看到一种情况:程序信号已经给出,气缸也能动,但动作慢半拍,或者连续运行一段时间后节拍开始漂。问题未必在控制程序,可能是阀的流量、响应时间、管径、节流位置和负载惯量没有配平。

在自动化产线上,Festo电磁阀比较典型的用法有两类。一类是单个动作点的控制,比如工装夹具的压紧、检测治具的定位销、包装线上的推料气缸。这里关注的是动作可靠、维护方便、阀体安装位置不要影响换管和拆线。另一类是集中式阀岛或多阀组合,用在动作点密集的设备上,比如电子装配机、汽车零部件装配线、锂电池工序里的定位夹紧单元。集中布置可以减少柜内接线和分散配管,但也要求前期把动作分区、维护通道和故障隔离想清楚。
包装和物流设备里,电磁阀常控制挡停、分拣、推箱、压盒等重复动作。这里的负载通常不算大,但频率高,节拍短。选阀时只看接口尺寸容易出问题,接口相同不代表流量足够,流量够也不代表长管路末端的动作一定干脆。若挡停器升起太慢,前后料件距离就会被拉乱;若推料气缸回位不稳定,后面的检测或封箱工位就会跟着停。
在装配夹具和检测设备中,气路控制更看重动作顺序和保持状态。比如一个电子组件压装工位,夹紧、定位、压合、释放之间可能只有几百毫秒的间隔。电磁阀需要和磁性开关、压力开关、真空检测或位置传感器一起工作,不能只理解成一个开关件。现场更怕的是偶发问题:某个夹爪偶尔没夹紧,设备不停机,但良品率开始波动。这类问题排查起来比完全不动作更麻烦。
机器人末端也会用到电磁阀,常见于气爪、吸盘和辅助吹气。机器人动作空间紧凑,阀装在末端还是装在固定支架上,要看响应要求、重量限制和管线拖链布置。阀离执行器越近,气路容积越小,响应通常更直接;但阀装到末端后,重量、振动、维修空间和电缆管理又会变成新问题。能动作,不等于能在三班倒里稳定跑几个月。
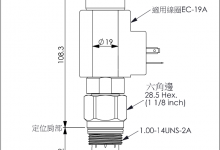
选用Festo电磁阀时,现场一般要先把工作条件列清楚:气源压力是否稳定,执行器缸径和行程多大,动作频率高不高,环境有没有粉尘、水汽、油雾或清洗要求,控制电压和接口方式是否与现有PLC匹配。如果是替换旧阀,还要核对阀位数、通口形式、底板或汇流板结构、接线方式、手动操作方式和安装孔位。很多替换故障不是品牌问题,而是把5/2、5/3、常闭、常开、单电控、双电控这些细节看得太粗。

维护层面,电磁阀最怕被当成免维护零件。线圈发热、阀芯卡滞、密封老化、消音器堵塞、管路漏气,都会让动作变慢或气耗上升。产线改造时还要给阀组留下拆装空间,标签也要做清楚。一个阀坏了不可怕,怕的是停机后没人能快速判断它对应哪只气缸、哪一路信号、哪根气管。
所以,Festo电磁阀在自动化产线里的价值,不是简单替代人工开关气路,而是把很多分散的小动作纳入可控节拍。它适合承担高频、轻中载、动作明确的气动控制任务;对于需要大推力、高刚性、精确位置控制或复杂力控的场景,则不能指望单靠电磁阀解决。把气源、阀、执行器、传感器和控制逻辑放在一起看,才是气路控制真正稳定的起点。